La Memoria¶
La Abstracción del Espacio de Direcciones: Introducción¶
El tema fundamental sobre la administración de memoria se encuentre en la forma adecuada de representarla. La memoria física puede ser imaginada como un arreglo de direcciones de memoria una detrás de otra.

Esta “abstracción” es manejable mientras la cantidad de memoria necesitada esta en un rango “manejable” y cual es ese rango. En DOS (Disk Operating System) ese rango lo daba la elección de una arquitectura determinada, la del 8086, que permite tener direcciones de memoria de hasta \(2^{20}\) bits, es decir 1 MegaByte de memoria.
Los primeros sistemas¶
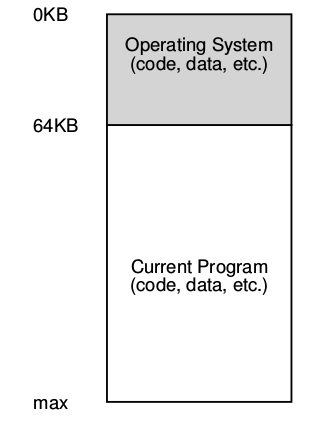
En los primeros Sistemas Operativos, en “the Early Days”, en los cuales el mismo S.O. se desplegaba en solo 64 KiloBytes de memoria, el resto de la misma estaba disponible para un único proceso ejecutándose a partir de los 64Kb de memoria física, ver figura :
No había mucha ilusión que este pudiera crear en esta época.
Los usuarios no esperaban mucho del sistema operativo.
No había muchos usuarios de sistemas operativos.
El sistema operativo era más o menos un conjunto de funciones o rutinas (específicamente una biblioteca) que se alojaba en la memoria empezando en la dirección física 0, y después existía un único programa en ejecución (un proceso) que se encontraba en la memoria física de la computadora, esta memoria era el resto no utilizado por el sistema operativo.
Multiprogramación y Time Sharing¶
Después de un tiempo y debido a que las computadoras eran muy caras la gente empezó a compartir las computadoras de una manera mas efectiva la Era de la multiprogramación había visto la luz del día (saw the ligth of the day):
En la cual más de un proceso estaba preparado para ser ejecutado en algún determinado momento, y el sistema operativo intercalaba dicha ejecución según la circunstancia. Haciendo esto se mejoró efectivamente el uso de la CPU, tal mejora en la eficiencia fue particularmente decisiva en esos días en la cual una computadora costaba cientos de miles o tal vez millones de dolares.
En esta era, múltiples procesos están listos para ser ejecutados un determinado tiempo [^1] según el S.O. lo decidiese en base a ciertas políticas de planificación o scheduling. De todas formas había una computadora para varias personas aún.
Rápidamente la demanda de mas computadoras, es decir, una computadora para una persona, dio el impulso para que la era del time sharing naciese.
Específicamente, muchos se dieron cuenta de las limitaciones de la computación batch, particularmente los programadores, los que estaban cansados de largos ciclos de programar - debuguear.
La noción de interacción empezó a tomar importancia, esta interacción es pensada teniendo en cuenta que varios usuarios deberían poder concurrentemente utilizar una misma computadora, y cada uno de estos estaría esperando un determinado tiempo para obtener cierta respuesta de las tareas una respuesta del proceso que estaba ejecutando en ese momento, era vital.
Una forma de implementar el time sharing es aquella de:
Un proceso por un determinado time slice o quantum de tiempo al cual se le da acceso a toda la memoria y los recursos.
Hasta que éste debe detener su ejecución, grabar su estado [^2]: en algún lugar como por ejemplo el disco.
Cargar otro proceso.
Ejecutarlo por un rato, y así sucesivamente.
de esta forma se implementa una especie de time sharing rudimentario … Desafortunadamente este método tiene un gran problema, es demasiado lento particularmente cuando la memoria de la computadora comienza a crecer.
Teniendo en cuenta que hacer un cambio de contexto a nivel registros es relativamente rápido hacer lo mismo con el contenido de la memoria hacia el disco es muy poco eficiente, por eso, es más fácil mantener los procesos en memoria, mientras se realizan los cambios de quien se está ejecutando, de esa forma se permite implementar eficientemente time sharing.
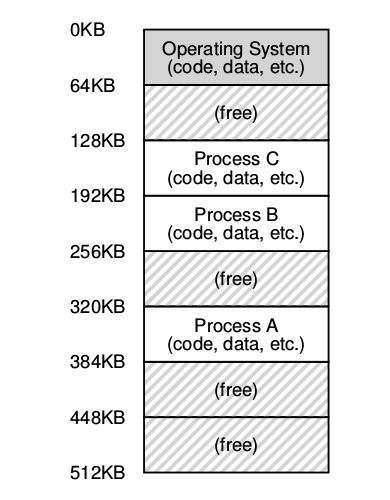
La idea de los sistemas operativos time sharing apuntó a darle a cada proceso una pequeña parte de la memoria física:
A medida que el time sharing se empezó a hacer cada vez mas popular uno se podría preguntar cuales fueron las siguientes demandas sobre los sistemas operativos, la respuesta a esta pregunta se basa en la protección. Varios procesos ejecutándose en memoria podrían interactuar entre ellos y …¿Por qué sería eso un problema?
El Espacio de Direcciones o Address Space¶
Crear un mecanismo que permita que la memoria física de una computadora sea utilizada de forma fácil y eficiente llevo paulatinamente a concebir el concepto de espacio de direcciones, la abstracción para la memoria.
El Address Space de un proceso contiene todo el estado de la memoria de un programa en ejecución.
Por ejemplo:
El código del programa tiene que estar alojado en la memoria en algún lugar.
El programa mientras se está ejecutando usa el stack para mantener registro de donde se encuentra en la cadena de llamadas a funciones o procedimientos para reservar espacios para las variables locales, para pasar parámetros y a su vez devolver valores de y hacia una rutina.
Finalmente se utiliza el heap para reservar memoria de forma dinámica.
Existen por supuesto otras cosas en la memoria: Variables estáticas, constantes, etc.
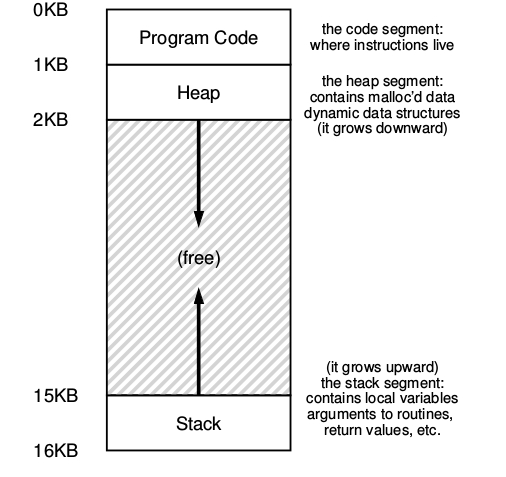
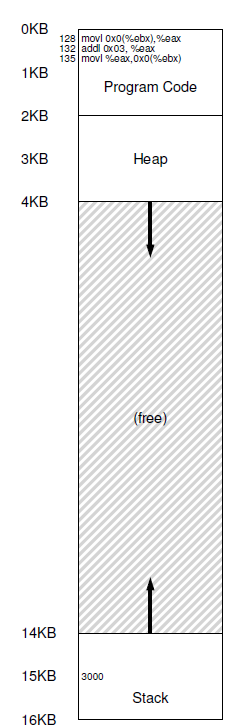
En el ejemplo, se presenta un pequeño espacio de direcciones de 16kb.
El código fuente del programa vive en lo alto del espacio de direcciones empezando de 0 en este ejemplo y esta empaquetado en la primer 1k del espacio de direcciones. El código fuente es estático por ende se puede poner al principio del espacio de direcciones y no necesitará más espacio mientras que el programa se ejecute.
Por otro lado hay dos regiones del espacio de direcciones que pueden crecer o achicarse mientras el programa se esta ejecutando. Como ya se sabe son el Heap y el Stack, debido a que ambas en algún momento van a querer crecer siempre se ponen en los extremos del espacio de direcciones enfrentadas entre si.
De esta forma se permite tal crecimiento solamente que el mismo se dirige a direcciones opuestas:
El heap empieza justo después del código fuente y crece hacia abajo.
El stack empieza al final del espacio de direcciones y crece hacia arriba.
Por supuesto que cuando se describe de esta forma el espacio de direcciones lo que se esta describiendo es la abstracción que el sistema operativo provee para ejecutar un programa.
En realidad el programa no se encuentra en el rango de las direcciones de memoria física entre 0 y 16k.
Cuando el sistema operativo realiza esto, se dice que el sistema operativo esta virtualizando memoria porque el programa que se esta ejecutado piensa que esta cargado en una dirección de memoria particular, en este caso la 0 y tiene potencialmente un espacio de direcciones muy grande; la realidad es bastante diferente.
Cuando por ejemplo un proceso trata de cargar el contenido de la dirección 0, que a partir de ahora llamaremos la dirección virtual 0, de alguna forma el sistema operativo con ayuda de algún tipo de mecanismo de hardware que tendrá que asegurarse que no se cargue la dirección física 0 real más bien que se cargue la dirección física en la cual el espacio de direcciones de ese proceso se encuentra alojado.
El Espacio de Direcciones o Address Space es la abstracción fundamental sobre la memoria de una computadora. Consiste en dar un mecanismo fácil de usar a lo usuarios de la computadora.
Cuando se describe el espacio de direcciones se está describiendo la abstracción que el Sistema Operativo le proporciona al programa en ejecución sobre la memoria de la computadora.
Cuando el Sistema Operativo implementa esta abstracción, se dice que el O.S. está Virtualizando la Memoria ya que el programa en ejecución cree que está cargado en un lugar particular de la memoria (la posición 0 dirección virtual o virtual address) y tiene potencialmente toda la memoria para él[^3].
Conclusión¶
El sistema operativo tiene que virtualizar memoria… pero lo tiene que hacer con estilo, para ello una de las metas principales de la virtualización es la transparencia.
EL sistema operativo debería implementar la virtualización de memoria de forma tal que sea invisible al programa que se esta ejecutando; es más el programa debe comportarse como si el estuviera alojado en su propia área de memoria física privada.
Pero detrás de escena, el sistema operativo y el hardware hacen todo el trabajo para multiplexar memoria a lo largo de los diferentes procesos y por ende implementa la ilusión.
Otra meta importante de la virtualización es la eficiencia. El sistema operativo debe esforzarse para hacer que la virtualización sea lo más eficiente posible en términos de tiempo (no hacer que los programas corran mas lentos) y espacio (no usar demasiada memoria para las estructuras necesarias para soportar la virtualización).
Por ultimo, una tercera meta de la virtualización de memoria es la protección. El sistema operativo tiene que asegurarse de proteger a los procesos unos de otros como también proteger al sistema operativo de los procesos. Cuando un proceso realiza un load, un store, o un fetch de una instrucción este no tiene que ser capaz de hacerlo o afectar de ninguna forma al contenido de la memoria del proceso o del sistema operativo.
La protección por ende habilita una propiedad llamada aislamiento entre proceso; cada proceso tiene que ejecutarse en su propio caparazón aislado y seguro de los avatares de otros procesos con fallas o incluso maliciosos. Por ejemplo:
#include <stdio.h>
#include <stdlib.h>
int main(int argc, char *argv[]) {
printf("location of code : %p\n", (void *) main);
printf("location of heap : %p\n", (void *) malloc(1));
int x = 3;
printf("location of stack : %p\n", (void *) &x);
return x;
}
Este programa, al ser ejecutado, como resultado muestra:
location of code : 0x4005d6
location of heap : 0x1b71420
location of stack : 0x7fffa4d6fb54
¿qué observaciones pueden obtenerse del mismo? [^4]…
El API de Memoria¶
Es importante, cuando se está trabajando con la memoria, cuáles son las funciones que permiten obtener y liberar memoria; y los errores comunes al utilizar estas herramientas. Además, también es importante saber los tipos de memoria que existen.
Tipos de Memoria¶
En un programa en ejecución existen dos tipos de memoria, cuando se ejecuta un programa escrito en C existen dos tipos de memoria que se reservan.
Memoria de stack, su reserva y liberación es manejada implícitamente por el compilador en nombre del programador por esta razón a veces también se denomina memoria automática. La declaración de memoria en el stack en C es sencilla, se declara una variable de algún tipo de dato y el compilador se encarga de hacer el resto.
void func() {
int x; // declara un entero en el stack
. . .
}
Una vez que el código anterior se compila es el mismo compilador el que se ocupa de todo. Cuando inicia la función, el compilador es el que se encarga de obtener esa memoria por el programador.
Heap Memory: este tipo de memoria es aquel que es obtenida y liberada explícitamente por el programador [^5].
void func() {
int *x = (int *) malloc(sizeof(int));
. . .
}
malloc()¶
La utilización de la función malloc() es bastante sencilla se le pasa la cantidad de bites que es necesaria reservar en el heap y si hay espacio en el mismo devuelve un puntero al nuevo espacio reservado, en caso de fallar devuelve un NULL.
Si bien esta forma de usar malloc puede parecer sencilla hay que prestar mucha atención a la hora de utilizarla porque puede generar varios tipos de errores.
#include <stdlib.h>
void *malloc(size_t size);
malloc() devuelve un puntero a un bloque de memoria de por lo menos size bytes adecuadamente alineado al cualquier tipo de datos que pueda contener el bloque. En la práctica esta aliniamiento depende de la arquitectura:
32 bits: malloc() devuelve valores de direcciones múltiplos de 8.
64 bits: malloac() devuelve valores de direcciones múltiplos de 16.
Devuelve NULL si algo salió mal y setea errno
No inicializa el bloque de memoria (usar calloc())
Una de las razones que puede llevar a que un programa crashee son las diferencias en la arquitectura en el cual fue compilado.
#include<stdlib.h>
double *d = ( double *) malloc( sizeof(double) );
. . .
tener en cuenta que malloc() devuelve un puntero de tipo void.
free()¶
De la misma forma en que la memoria es creada una ve que deja de utilizarse debe ser liberada, al igual que en la contabilidad el debe y el haber tiene que balancear si se ha reservado espacio para alguna cantidad X de memoria una vez que no se utiliza mas debe ser liberada, para ello se utiliza Free.
#include<stdlib.h>
void free(void *ptr);
ptr debe ser un bloque devuelto por malloc(), calloc() o realloc(). De no ser así el comportamiento de free está indefinido.
free() no avisa si algo salió mal.
Esta función toma solamente un parámetro, el puntero que fue devuelto por Malloc.
Teorema de Méndez:
La memoria se crea y se destruye nunca se TRANSFORMA. Mariano Méndez
int *x = malloc( 10 * sizeof(int) );
. . .
free(x);
Errores comunes¶
Olvidarse de obtener o alocar memoria 😆 … ¿un ejemplo?
No obtener la suficiente memoria 😳 …
Olvidarse de inicializar la memoria obtenida 😮 …
Olvidarse de liberar memoria 😓
Liberar memoria antes de terminar de usarla 😣 …
Liberar memoria repetidas veces … double free su resultado es INDEFINIDO 😖
Implementación¶
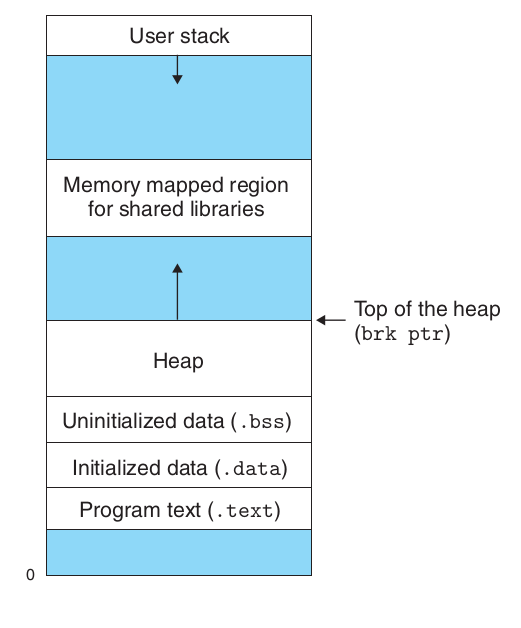
Como se vio, en ningún momento se hizo referencia a las System Call de memoria debido a que no existen tales system calls. El manejo de memoria está orientado a llamadas a una biblioteca, en este caso <stdlib.h>, obviamente que malloc() y free() hacen llamadas en su interior a ciertas system call, esta son brk() y sbrk()
brk(): cambia el lugar donde el programa termina o se rompe (break), es decir el lugar donde el heap termina. Solo recibe un parámetro que es el lugar de la nueva dirección de fin del heap.
#include <unistd.h>
int brk(void *addr);
Para cada proceso el kernel mantiene una variable llamada brk (break) que apunta al tope del heap, la system call, brk() lo que hace es sustituir la dirección del brk con el valor especificado en addr.
Una idea de lo que hace brk es:
algorithm brk
input: nuevo valor del break
output: viejo valor del break
{
lock process data region;
if (region size increasing)
if (new region size is illegal)
{
unlock data region;
return (error);
}
change region size (algorithm growreg);
zero out addresses in new data space;
unlock process data region;
}
sbrk(): hace lo mismo que break pero el parámetro es la cantidad de bytes, en _linux_ sbrk() es una library call que a su vez llama a brk().
un caso interesante de ver es la implementacion de la syscall sbrk() en xv6:
int
sys_sbrk(void)
{
int addr;
int n;
if(argint(0, &n) < 0)
return -1;
addr = myproc()->sz;
if(growproc(n) < 0)
return -1;
return addr;
}
num |
name |
perform |
eax |
|---|---|---|---|
13 |
brk |
change data segment size |
0x0c |
static int do_brk_flags(unsigned long addr, unsigned long request, unsigned long flags,struct list_head *uf);
SYSCALL_DEFINE1(brk, unsigned long, brk)
{
unsigned long retval;
unsigned long newbrk, oldbrk;
struct mm_struct *mm = current->mm;
struct vm_area_struct *next;
unsigned long min_brk;
bool populate;
LIST_HEAD(uf);
if (down_write_killable(&mm->mmap_sem))
return -EINTR;
#ifdef CONFIG_COMPAT_BRK
/*
* CONFIG_COMPAT_BRK can still be overridden by setting
* randomize_va_space to 2, which will still cause mm->start_brk
* to be arbitrarily shifted
*/
if (current->brk_randomized)
min_brk = mm->start_brk;
else
min_brk = mm->end_data;
#else
min_brk = mm->start_brk;
#endif
if (brk < min_brk)
goto out;
/*
* Check against rlimit here. If this check is done later after the test
* of oldbrk with newbrk then it can escape the test and let the data
* segment grow beyond its set limit the in case where the limit is
* not page aligned -Ram Gupta
*/
if (check_data_rlimit(rlimit(RLIMIT_DATA), brk, mm->start_brk,mm->end_data, mm->start_data))
goto out;
newbrk = PAGE_ALIGN(brk);
oldbrk = PAGE_ALIGN(mm->brk);
if (oldbrk == newbrk)
goto set_brk;
/* Always allow shrinking brk. */
if (brk <= mm->brk) {
if (!do_munmap(mm, newbrk, oldbrk-newbrk, &uf))
goto set_brk;
goto out;
}
/* Check against existing mmap mappings. */
next = find_vma(mm, oldbrk);
if (next && newbrk + PAGE_SIZE > vm_start_gap(next))
goto out;
/* Ok, looks good - let it rip. */
if (do_brk_flags(oldbrk, newbrk-oldbrk, 0, &uf) < 0)
goto out;
set_brk:
m->brk = brk;
populate = newbrk > oldbrk && (mm->def_flags & VM_LOCKED) != 0;
up_write(&mm->mmap_sem);
userfaultfd_unmap_complete(mm, &uf);
if (populate)
mm_populate(oldbrk, newbrk - oldbrk);
return brk;
out:
retval = mm->brk;
up_write(&mm->mmap_sem);
return retval;
}
Address Translation¶
Existen dos puntos importantes a la hora de virtualizar memoria:
la flexibilidad
la eficiencia
Para llegar a ellos un buen mecanismo de virtualizacion de memoria debe ser lo mas flexible y eficiente posible.
¿Cómo se logra esto?¶
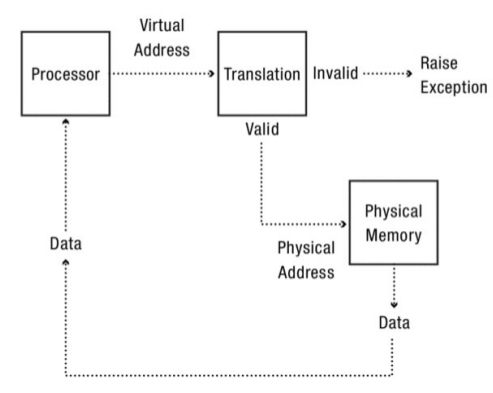
Mediante la utilización de una técnica llamada Hardware-Based Address Translation o como más comúnmente se conoce Address Translation.
Con esta técnica el hardware transforma cada acceso a memoria, transformando la virtual address que es provista desde dentro del espacio de direcciones en una physical address en la cual la información deseada se encuentra realmente almacenada.
Entonces, en todos y por cada una de las referencias a memoria un address translation es realizada por el hardware para redireccionar las referencias a la memoria de la aplicación hacia las posiciones reales en la memoria física.
Es evidente, que el hardware por sí solo no puede virtualizar la memoria este solo provee un mecanismo de bajo nivel para poder hacerlo eficientemente.
El sistema operativo tiene que involucrarse en los puntos claves para:
setear al hardware de forma correcta para que esta traducción se de lugar;
por eso debe entonces gerenciar la memoria, manteniendo información de en que lugar hay áreas libres y en que lugar hay áreas en uso;
y por último intervenir de forma criteriosa como mantener el control sobre toda la memoria usada.
Otra vez, todo esto se trata de crear una bella ilusión:
que el programa tenga su propia memoria privada donde reside su propio código y sus propios datos.
Detrás de esa realidad virtual existe o yace una fea verdad física que muchos programas se encuentran realmente compartiendo memoria a mismo tiempo que la CPU los cambia de estado ejecutando un único programa y el siguiente.
Address translation es el término por el cual se conoce al mecanismo, proporcionado por el hardware, que permite a partir de una dirección virtual obtener la dirección física correspondiente. Esa traducción es realizada por el hardware. El S.O. está en el medio de ese proceso y determina si el mismo se ha realizado correctamente. Lo que hace es gerenciar el manejo de la memoria:
Manteniendo registro de que parte está libre.
Que parte está en uso.
Manteniendo el control de la forma en la cual la memoria está siendo utilizada.
Desde la perspectiva del programador el proceso de address translation es completamente transparente, si bien, el hecho es que en realidad la memoria es almacenada en un lugar completamente diferente de donde él cree que está siendo almacenada.
Si el proceso de address translation se considera como una caja negra, sería una función
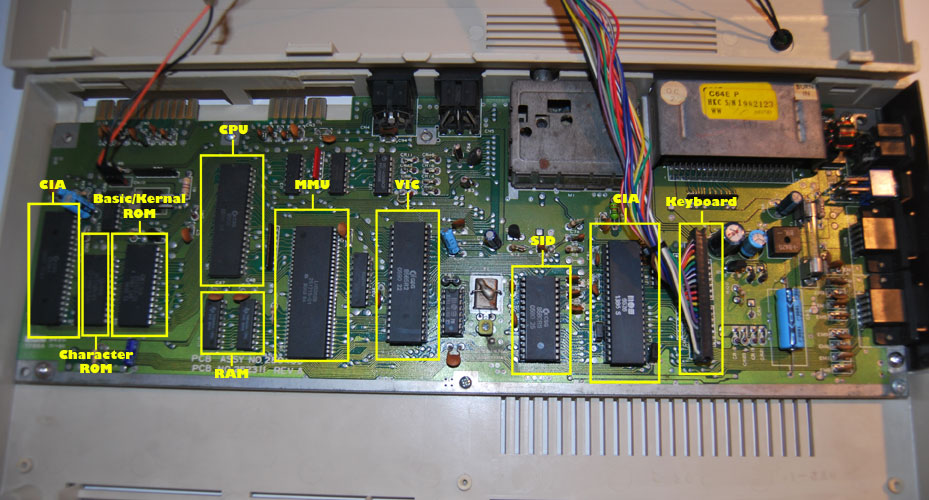
Ejemplo de MMU fuera del procesador, Commodore-64:
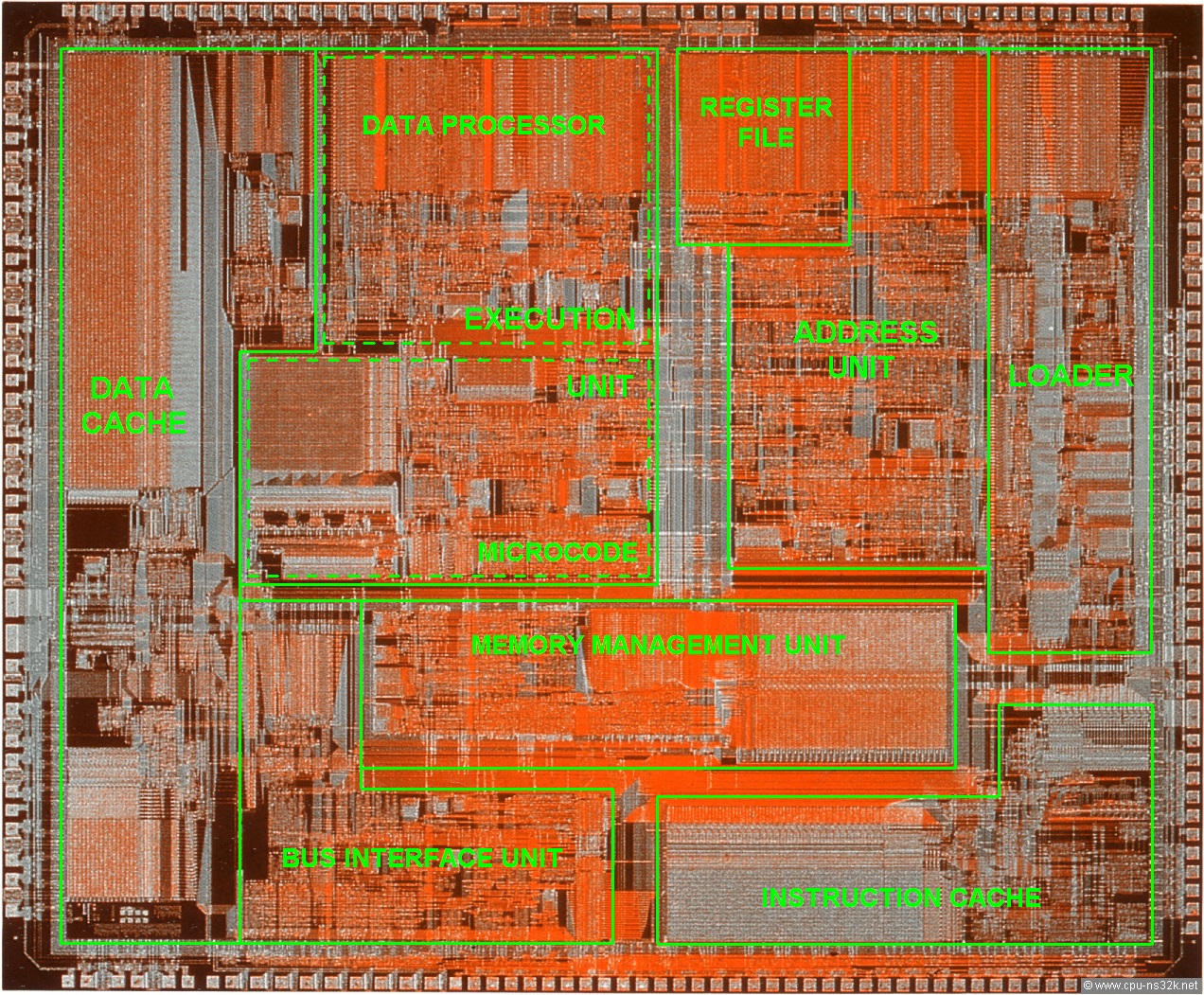
Un ejemplo de MMU integrada a un procesador NS32532:
Qué Provee el Address Translation¶
Process isolation: Protecting the operating system kernel and other applications against buggy or malicious code requires the ability to limit memory references by applications. Likewise, address translation can be used by applications to construct safe execution sandboxes for third party extensions.
Interprocess communication: Often processes need to coordinate with each other, and an efficient way to do that is to have the processes share a common memory region.
Shared code segments: Instances of the same program can share the program’s instructions, reducing their memory footprint and making the processor cache more efficient. Likewise, different programs can share common libraries.
Program initialization: Using address translation, we can start a program running before all of its code is loaded into memory from disk.
Efficient dynamic memory allocation: As a process grows its heap, or as a thread grows its stack, we can use address translation to trap to the kernel to allocate memory for those purposes only as needed.
Cache management: the operating systemcan arrange how programs are positioned in physical memory to improve cache efficiency, through a system called page coloring.
Program debugging: The operating system can use memory translation to prevent a buggy program from overwriting its own code region; by catching pointer errors earlier, it makes them much easier to debug. Debuggers also use address translation to install data breakpoints, to stop a program when it references a particular memory location.
Efficient I/O: Server operating systems are often limited by the rate at which they can transfer data to and from the disk and the network. Address translation enables data to be safely transferred directly between user-mode applications and I/O devices.
Memory mapped files: A convenient and efficient abstraction for many applications is to map files into the address space, so that the contents of the file can be directly referenced with program instructions.
Virtual memory: The operating system can provide applications the abstraction of more memory than is physically present on a given computer.
Checkpointing and restart: The state of a long-running program can be periodically checkpointed so that if the program or system crashes, it can be restarted from the saved state. The key challenge is to be able to perform an internally consistent checkpoint of the program’s data while the program continues to run.
Persistent data structures: The operating system can provide the abstraction of a persistent region of memory, where changes to the data structures in that region survive program and system crashes.
Process migration: An executing program can be transparently moved from one server to another, for example, for load balancing.
Information flow control. An extra layer of security is to verify that a program is not sending your private data to a third party; e.g., a smartphone application may need access to your phone list, but it shouldn’t be allowed to transmit that data. Address translation can be the basis for managing the flow of information into and out of a system.
Distributed shared memory: We can transparently turn a network of servers into a large-scale shared-memory parallel computer using address translation.
Más Formal¶
Formalmente, el proceso de address translation es un mapeo entre los elementos de un espacio de direcciones virtuales de N-elementos (VAS) y un espacio de direcciones físicas de M-elementos (PAS):
donde
Un ejemplo¶
El ejemplo ha sido extraído del capítulo 15 del libro de Arpacci. Se supone que es un proceso cuyo espacio de direcciones es el siguiente:
A continuación se mostrara un primer intento muy sencillo de como virtualizar memoria.
Especialmente se asumirán por ahora algunas cosas:
El espacio de direcciones del usuario tiene que ser puesto de forma contigua en la memoria física.
Para simplificar el espacio de direcciones no es demasiado grande específicamente es menor que el tamaño total de la memoria física.
Finalmente se asumirá que cada espacio de direcciones es exactamente del mismo tamaño (Estos supuestos seguirán relajando con el tiempo)
Para saber porque se tiene que implementar el address translation y porque es necesario tal mecanismo se presentará un sencillo ejemplo. Éste es una pequeña secuencia escrita en código en C que carga un determinado valor, desde la memoria lo incrementa por tres y luego lo vuelve a guardar en la memoria.
El código C de este programa es el siguiente
void func {
int x = 3000;
x=x+3;
}
El compilador va a transformar esta linea de código C en assembly que se va a parecer al assemby de x86. para ver el assembly producido por el compilador puede utilizarse la herramienta de linux objdump o otool en mac os y el desensamblado del mismo es el siguiente:
128: movl 0x0(%ebx), %eax ;carga 0*ebx en eax
132: addl $0x03, %eax ;suma 3 al registro eax
135: movl %eax;0x0(%evx) ;guarda el contenido dax de regreso en la memoria
Este pequeño trozo de código es relativamente fácil de entender:
este presupone que la dirección de la variable x ha sido guardada en el registro ebx y posteriormente carga el valor que se encuentra en esa dirección de memoria en el registro de opositor general eax utilizando para ello una instrucción movl ((movl -> move longword))
La siguiente instrucción le suma 3 al registro eax,
y la instrucción final guarda el valor dax de vuelta en la memoria principal en la misma posición de memoria.
Lo importante de este ejemplo es que desde el punto de vista del programa o proceso el espacio de direcciones comienza en 0 termina en 16Kb; y todas las referencias a direcciones generadas deben estar acotadas a esos valores.
Entonces el problema es que obviamente en la memoria física se tiene únicamente un valor 0 y un valor 16kb disponibles: 1. ¿Cómo se re-ubica el proceso en memoria de forma que esto sea transparente para el proceso? 2. ¿Cómo se provee la ilusión de un espacio virtual de direccionamiento que comience en 0 para cada proceso?
Se puede ver como :
ambos, el código fuente y los datos son puestos en el mismo address space;
la secuencia del código de las 3 instrucciones están localizadas en la dirección 128 en la sección de código cercano al inicio del address space,
y el valor de la variable x se encuentra en la posición 15kb hacia abajo en el stack cerca del final del address space.
Inicialmente el valor de x es 3. Cuando las 3 instrucciones son ejecutadas desde la perspectiva del proceso los siguientes accesos a memoria se realizan.:
Se va a buscar la instrucción a la dirección 128
Se ejecuta esa instrucción (se carga en un registro la dirección 15 kb)
Se va a buscar la instrucción a la dirección 132
Se ejecuta esta instrucción (no hay referencias a memoria)
Se va a buscar la instrucción a la dirección 135
Se ejecuta esta instrucción (guardar el contenido en registro en la dirección 15kb)
Desde la perspectiva del programa, su espacio de direcciones empieza en 0 y crece hasta un máximo de 16 kb; todas las referencias de memoria que esta genera tiene que estar dentro de esos limites.
Si bien para virtualizar memoria el sistema operativo tiene que ubicar el proceso en algún lugar de la memoria física no necesariamente cerca de la dirección física 0.
Entonces se tiene el siguiente problema:
¿Cómo se reubica el proceso en memoria de forma tal que esto sea transparente para el proceso?
¿Cómo se provee la ilusión de que una space address virtual empieza en la posición 0 cuando en realidad ese address space esta reubicado en algún lugar en otra dirección física.
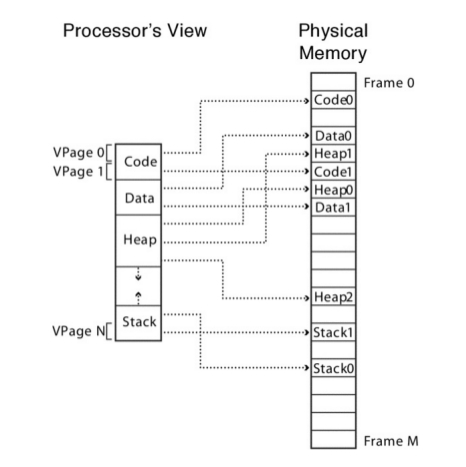
Un ejemplo de como tendría que verse la memoria física una vez que el address space del proceso es puesto en memoria puede verse en la figura a continuación:
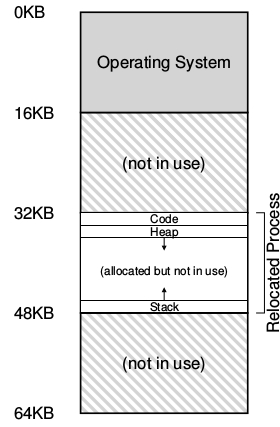
En la figura se puede ver al sistema operativo que utiliza los primeros slot de memoria física para el mismo y que se ha reubicado al proceso anterior arriba de la dirección física 32 k.
Dynamic Realocation o Memoria Segmentada [DAH]¶
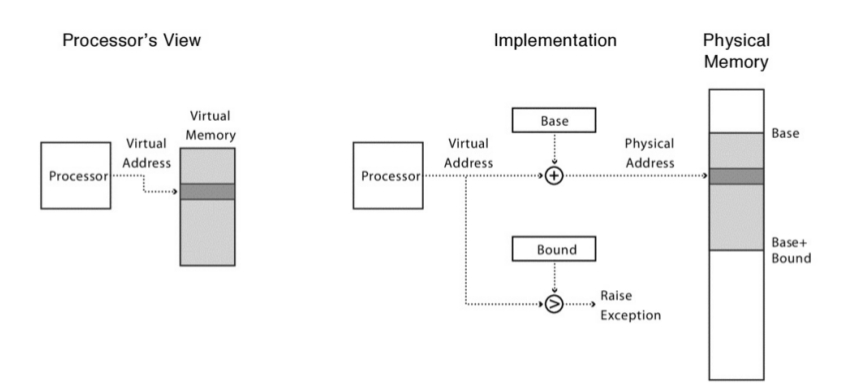
Base and Bound¶
Para ir ganando comprensión sobre el hardware-based address trasnlation, se verá su primera implementación, introducida en las primera máquinas que utilizaban time-sharing hacia el fin de los años 50, es una idea simple llamada base y segmento también puede ser vista como dynamic realocation.
Específicamente solo se necesitan dos registros de hardware dentro de cada cpu: Uno llamado registro base y el otro registro límite o Segmento.
Este par base-limite va a permitir que el address space pueda ser ubicado en cualquier lugar deseado de la memoria física, y se hará mientras el sistema operativo se asegura que el proceso solo puede acceder a su address space.
En esta configuración, cada programa es escrito y compilado como si fuera cargado en la dirección física 0. A su vez cuando se inicia la ejecución del programa el OS decide en que lugar va a cargar el mismo y para hacerlo setea el registro base en un determinado valor. Algunas cosas interesantes pasan cuando el proceso se esta ejecutando. A partir de ahora cuando cualquier referencia es generada por el proceso es traducida por el procesador de la siguiente manera:
physical address = virtual address + base
Cada referencia de memoria generada por el procesador es una dirección virtual; el hardware cada vez que se hace referencia a esta dirección tiene que sumar el contenido del registro base y su resultado es la dirección física que tiene que ser utilizada en la memoria del sistema.
Veamos esto con el ejemplo planteado:
compilador puede utilizarse la herramienta de linux objdump or otool en mac os y el desensamblado del mismo es el siguiente:
128:movl 0x0(%ebx), %eax
El contador de programa es inicializado en 128; cuando el hardware necesita obtener esta instrucción, primero se suma el valor del registro base 32kb (32768) para obtener la dirección de memoria física 32896.
Una vez obtenida esta dirección el hardware obtiene la instrucción que esta almacenada en esa dirección física.
A continuación el procesador empieza a ejecutar la instrucción.
En un determinado punto el proceso necesita cargar el contenido de la dirección virtual 15 kb, entonces el procesador toma y otra vez le suma el registro base, obteniendo finalmente la dirección física de 47k y por ende el contenido deseado.
El proceso que transforma la virtual address en la physical address es exactamente la técnica conocida como address translation. Esto es el hardware toma una dirección virtual a la cual el proceso cree que esta referenciando y la transforma en una dirección física que es el lugar en el cual realmente los datos están ubicados. Debido a que esta ubicación sucede en run-time y debido a que se puede mover el address space incluso una vez que el proceso empezó a ejecutarse la técnica habitualmente es referenciada como dynamic realocation o realocación dinámica.
Ahora la pregunta es: que pasa con los bound registers o registro de segmento…
El registro bound está allí para ayudar con la protección. Específicamente, el procesador antes que hacer nada va a checkear que la referencia de memoria este dentro de los limites del address space para asegurarse que la misma sea legal, en el ejemplo anterior el bounds regiter esta configurado en 16 kb.
Si un proceso genera una dirección virtual que es mayor que los límites o una dirección que es negativa la CPU va a generar una excepción y el proceso va a terminarse.
El punto es que los límites están ahí para asegurarse ue todas las direcciones generadas por el proceso sean legales y estén dentro del límite del mismo.
Se habrá notado que el registro base y el límite son estructuras de hardware mantenidas dentro del mismo procesador o chip. Antiguamente a esa parte del procesador que ayudaba a la address translation se la llamaba memory management unit (MMU). A medida que se fueron sofisticando las técnicas de gerenciamiento de memoria se fue agregando mas circuiteria a lo que se llamaba MMU.
Un pequeño detalle sobre el bound register, puede ser definidos en dos formas diferentes:
la primera: este registro mantiene el tamaño del address space entonces el hardware chequea la dirección virtual contra el bound register, sumándole primero el registro base.
la segunda es mediante el bound register almacena la dirección física del fin del espacio de direcciones.
Link a Modo Real x86.
Address Translation con Tabla de Segmentos¶
El problema de la técnica anterior es que se tiene un solo registro registro base y solo un segmento. La mejora a este método es mediante la aplicación de un pequeño cambio: en vez de tener un solo registro limite, se tiene un arreglo de pares de (registro base, segmento) por cada proceso:
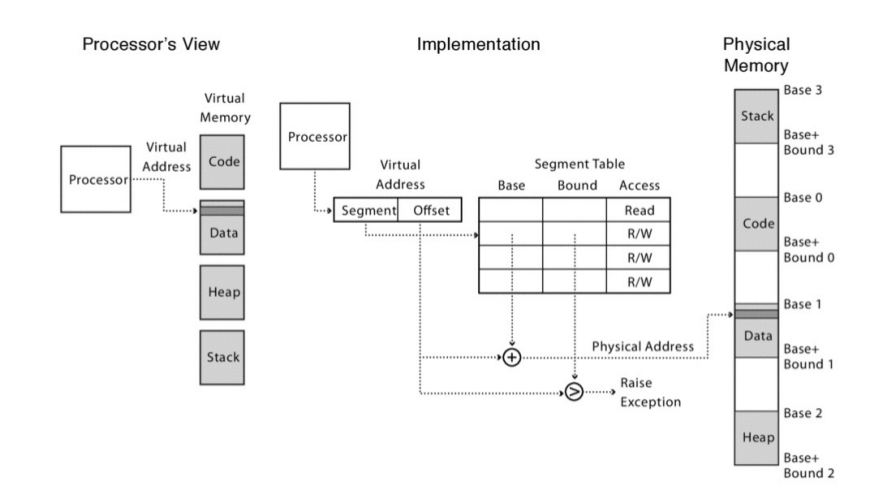
cada entrada en el arreglo controla una porción del virtual address space. La memoria física de cada segmento es almacenada continuamente, pero distintos segmentos pueden estar ubicados en distintas partes de la memoria física.
Una dirección virtual tiene dos componentes:
un número de segmento
un offset de segmento
El numero de segmento es el indice de la taba para ubicar el inicio del segmento en la memoria física. El registro bound es chequeado contra la suma del registro base+offset para prevenir que el proceso lea o escriba fuera de su región de memoria.
En una dirección virtual utilizando esta técnica, los bit de mas alto orden son utilizados como índice en la tabla de de segmentos. El resto se toma como offset y es sumado al registro base y comparado contra el registro bound. El numero de segmentos depende de la cantidad de bits que se utilizan como índice.
El error de Segmentation Fault era un error que se daba cuando, en las máquinas que implementaban segmentación, se quería direccionar una posición fuera del espacio direccionable. Increíblemente este error aun se utiliza en sistemas operativos que no usan segmentación.
Algunas notas:
El stack crece hacia atrás o backward, por ende el hardware necesita saber sobre eso …. en un bit de información
Compartir: a veces es necesario poder compartir ciertos segmentos entre varios procesos, para ello el hardware necesita proporcionar un mecanismo , otro bit que permita saber si se puede ejecutar, escribir o leer por varios procesos a la vez. Para ello se usan un par de bits llamados protection bits.
Todo lo hace el hardware en este caso la MMU (Memory Mangement Unit).
Segmentación de grano fino vs segmentación de grano grueso. La primera consiste en tener muchos segmentos pequeños y la segunda consiste en tener pocos segmentos grandes.
El problema de la segmentación es la fragmentación, precisamente la fragmentación externa.
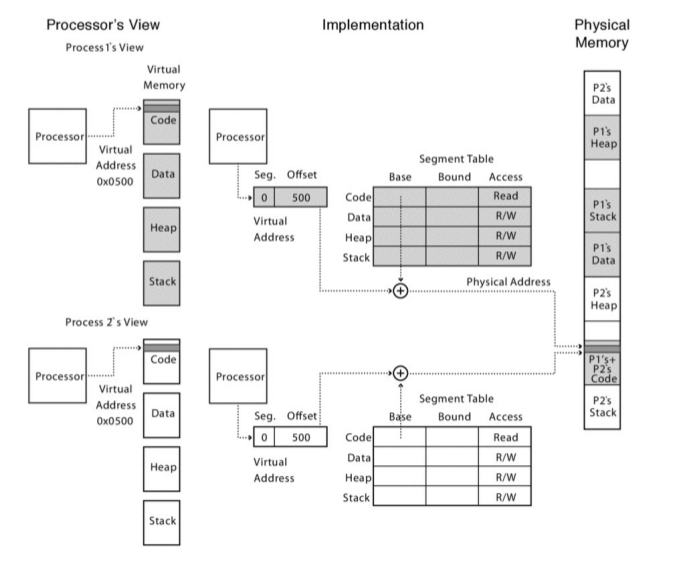
Ejemplo de dos procesos que comparten el code segment, pero con stack y data segment separados:
Link a Modo Protegido x86.
Memoria Paginada¶
Una alternativa a la memoria segmengata es la memoria paginada. Con la paginación, la memoria es reservada en pedazos de tamaño fijo llamados page frames. El address translation es similar a como se trabaja con la segmentación. En vez de tener una página de segmentos cuyas entradas contienen punteros a segmentos, hay una tabla de páginas por cada proceso cuyas entradas contienen punteros a las page frames. Teniendo en cuenta que los page frames tienen un tamaño fijo, y son potencia de 2,las entradas en la page table sólo tienen que proveer los bit superiores de la dirección de la page frame. De esta forma van a ser más compactos. No es necesario tener un límite; la página entera se reserva como una unidad.
Vista Lógica:
Address translation con Page Table¶
La vitual address tiene dos componentes:
El número de página virtual.
El offset dentro de esa página.
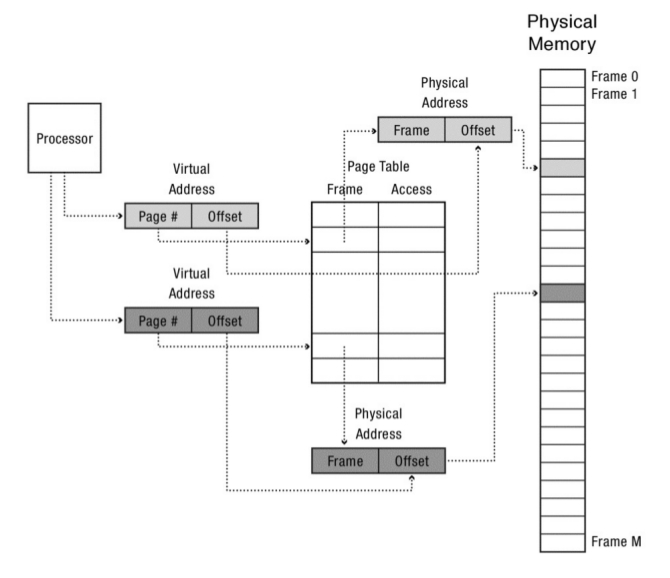
El número de la página virtual es el índice en la page table para obtener el page frame en la memoria física. La dirección física está compuesta por The Phisical Frame Page que se obtiene de la page table concatenado con el offset de la página que se obtiene de la virtual address. El sistema operativo maneja los accesos a la memoria.
Una de las cosas que pueden parecer raras sobre la paginación es que si bien el programa cree que su memoria es lineal, de hecho, su memoria está desparramada por toda la memoria física como si fuera un mosaico.
El procesador va a ejecutar una instrucción después de otra usando direcciones virtuales y esas direcciones virtuales son lineales. Si bien la instrucción ubicada en el final de una página podría estar ubicada en una región completamente diferente de la memoria física de la próxima instrucción que debe empezar en la siguiente página.
Las estructuras de datos que también son contiguas usando direcciones virtuales, en la realidad, una matriz muy grande podría estar desparramada por distintos page frames físicos. La paginación encuentra el mismo problema que la segmentación, saber qué espacio de la memoria está vacío es muy complicado.
Link Paginación x86.
Translation multilevel¶
Si se desea implementar un mecanismo eficiente de paginación, posiblemente elegir un arreglo no sea la solución más correcta. Un árbol o un hash table son más apropiados ya que son usados en sistemas más modernos.
Muchos sistemas utilizan técnicas de address trasnslation basados en árboles, si bien los detalles varían de sistema en sistema y la terminología también es un poco confusa, sin embargo estos sistemas que se describirán a continuación tienen propiedades bastantes similares. Estas técnicas soportan:
Protección de memoria de grano fino
Memoria Compartida
Ubicación de memoria flexible
Reserva eficiente de memoria
Un sistema de búsqueda de espacio de direcciones eficiente
Si bien todos los sistemas multinivel de address translation usan paginación en el nivel mas bajo del árbol; la principal diferencia entre ellos es como se llega a la page table a nivel de las hojas del árbol, ya sea usando segmentación mas paginación, múltiples niveles de paginación, segmentación mas múltiples niveles de paginación.
Paged Segmentation (Segmentación paginada)¶
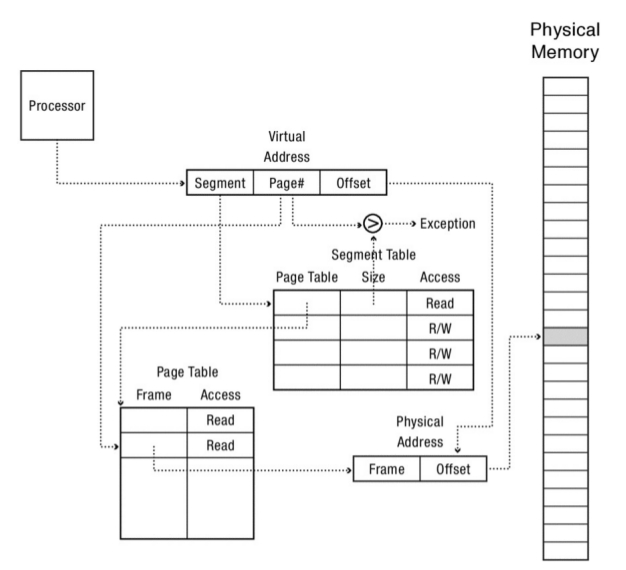
Este sistema utiliza dos niveles de un árbol. Con paged segmentation, la memoria esta segmentada, pero en vez de que cada entrada en la pagina de segmentos apunte directamente a una región continua de la memoria física, cada entrada en la tabla de segmentos apunta a una tabla de paginas, que a su vez apunta a la memoria correspondiente a ese segmento. La tabla de segmentos tiene una entrada llamada limite o tamaño que describe la longitud de la pagina de tablas, osea la longitud de los segmentos en las paginas. El proceso de traducción de virtual address a physycal address es el siguiente.
La virtual address tiene 3 componentes:
un numero de segmento,
un numero de pagina virtual dentro de ese segmento y
el offset dentro de la página.
El numero de segmento es el índice para la segment table que aloja la page table para se segmento. La page number de esa virtual address es el indice de la page table (que pertenece a un segmento se la segment table) que contiene una page frame en la memoria física. La physical address esta compuesta por el physical page frame que pertenece a la page table concadenado con el offset de la virtual address.
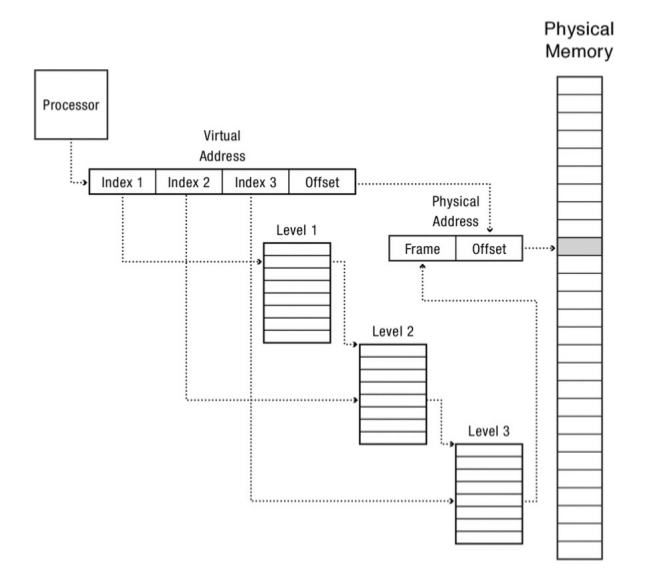
Address Translation con Tres Niveles de Page Tables¶
Este es un ejemplo concreto del sistema conocido como multi-levelpaging es similar a la paged segmentation, pero implementa multiples niveles de page tables. El procesador de sun microsystem sparc usa un sistema de 3 niveles de tablas de paginas.
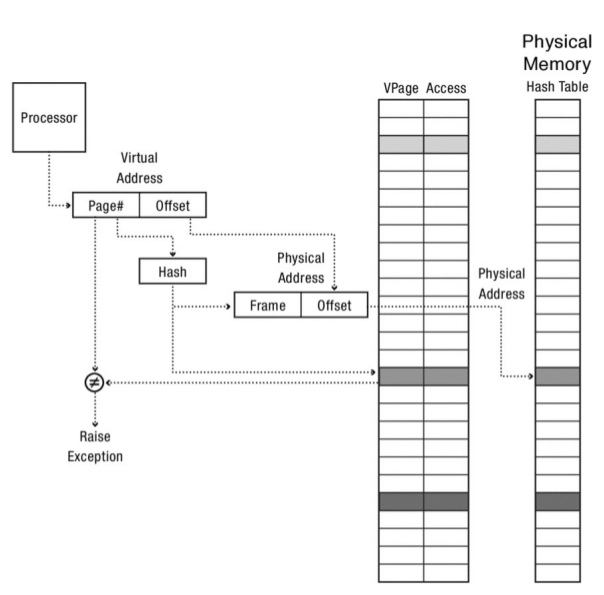
Address Translation con Tabla de Hash por Software¶
Multilevel page segmentation¶
Este es el sistema utilizado por las arquitecturas x86 para 64 y 32 bit.
En la arquitectura x86 cada proceso posee una Global Descriptor Table (GDT), que es equivalente a la segment table. La GDT es almacenada en la memoria; cada entrada a esta tabla apunta a una tabla de paginas (multinivel) para ese segmento. Para inicializar el proceso de address translation el sistema operativo setea la GDT e inicializa un registro llamado gdtr GDTR que contiene la dirección y la longitud de la GDT.
Por cada 32 bit en la arquitectura x86 la virtual address posee un segmento a una tabla de 2 niveles:
Los primeros 10 bit de la virtual address son el indice de la paged table de primer nivel, llamada page directory,
los otros 10 bit son el indice de una page table de segundo nivel
y finalmente los 12 bit restantes son el offset dentro de la pagina.
Cada entrada en la page table ocupan 4 bytes y existen 1024 entradas por ende el tamaño total de la page directory es de 4k, sucede lo mismo con la page table de segundo nivel y justo coincide con el tamaño de una pagina en la memoria física.
Hacia una eficiente Address Translation¶
Hasta aquí ya uno puede estar un poco cansado de todos los mecanismos de hardware para realizar la traducción de direcciones de memoria. El tema que muchos de estos métodos tiene varios niveles, hasta 4 en algunos casos, para alcanzar una dirección física, entonces eso lo hace realmente poco práctico para el procesador. A continuación se mostrarán mecanismos para mejorar el rendimiento de la traducción de las direcciones.
Para ello se usara un caché (o escondrijo), que consiste en una copia de ciertos datos que pueden ser accedidos mas de una vez más rápidamente. El concepto de Cache es ampliamente utilizado en muchas ramas de las ciencias de la computación: arquitectura de computadoras, sistemas operativos, sistemas distribuidos.
Uno de los problemas del address translation reside en la velocidad de la traducción para ello se utilizan técnicas que mejoran la velocidad de esta traducción. Para mejorar el address translation se utiliza un mecanismo de hardware llamado Translation-Lookaside Buffer; o tambien conocido como TLB. La TLB es parte de la MMU y es simplemente un mecanismo de cache de las traducciones mas utilizadas entre los pares virtual to physical address. Por ende un mejor nombre para este mecanismo podría ser address translation cache.
Por cada referencia a la memoria virtual, el hardware primero chequea la TLB para ver si esa traducción esta guardada ahí; si es así la traducción se hace rápidamente sin tener que consultar a la page table (la cual tiene todas las traducciones).
Este mecanismo tiene un tremendo impacto en la velocidad de la traducción.
Lookaside buffer¶
Si uno se pone a pensar la forma en que se programa, ésta tiene dos características: es secuencial y localizada:
...
mov r1,r2
mult r1,r2
...
El hardware tiene que hacer el fetch de la instrucción add, después pasear por todos los multiniveles de las tablas de traducción para encontrar la dirección física de la instrucción add; ejecutar la instrucción , incrementar el contador de programa y volver a hacer todo esto otra vez para la próxima instrucción y además para sus datos pero esto es muy ineficiente.
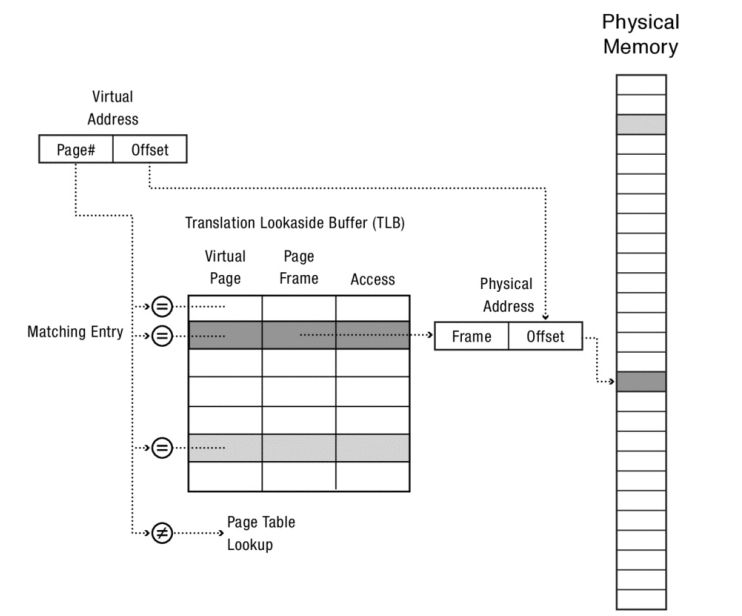
La Translation Lookaside Buffer (TLB) es una pequeña tabla a nivel hardware que contiene los resultados de la recientes traducciones de memorias realizadas. Cada entrada de la tabla mapea una virtual page a una physical page
TLB entry = {
virtual page number,
physical page frame number,
access permitions
}
Normalmente se chequean todas las entradas de la TLB contra la virtual page, si existe matcheo el procesador utiliza ese matcheo para formar la physical address, ahorrándose todos los pasos de la traducción.
Esto se llama un TLB hit
Cuando del proceso anterior no existe matcheo en la TLB , se dice que se tiene un TLB miss
Pareciera que este proceso es mas costoso, pero a nivel procesador tiene una ganancia muy buena en prestaciones ya que a nivel hardware está implemetado en memoria estática on chip que está localizada muy cerca del procesador.
Para que sea útil, la búsqueda de la TLB necesita ser mucho más rapido que realizar una traducción completa de una dirección de memoria. Por ende, las entradas de la tabla de la TLB son implementadas en una memoria muy rápida, memoria estática on-chip, situada muy cerca del procesador. De hecho, para mantener esta búsqueda rápida, muchos sistemas en la actualidad incluyen múltiples niveles de TLB. En general cuanto más pequeña es la memoria, más rápida es la búsqueda.
Si el primer nivel de la TLB produce un TLB miss existe otro nivel, que guarda más datos, y este es consultado y la traducción se realiza si se falla en ambos niveles
Consistencia de la TLB¶
Cada vez que se introduce un cache en el sistema, se necesita considerar la forma de asegurar la consistencia del cache con los datos originales cuando las entradas en el mismo son modificadas. Una TLB no es la exepción.
Para una ejecución correcta y segura de un programa, el sistema operativo tiene que asegurarse que cada programa ve su propia memoria y la de nadie más. Existen tres puntos a considerar:
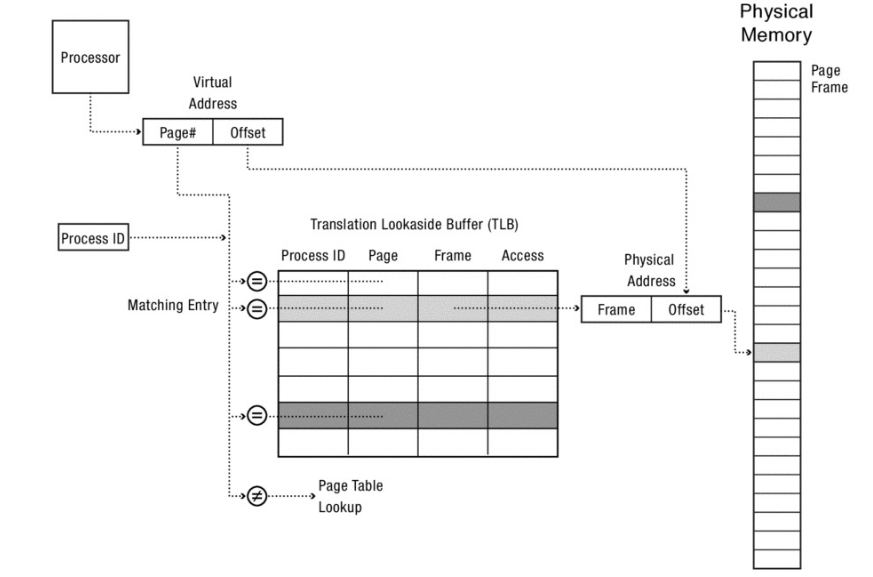
El context switch: Las direcciones virtuales del viejo proceso ya no son más válidas, y no deen ser válidas, para el nuevo proceso. De otra forma, el nuevo proceso sería capaz de leer las direcciones del viejo proceso. Frente a un context switch, se necesita descartar el contenido de TLB en cada context switch. Este approach se denomina flush de TLB. Debido a que este proceso acarrearía una penalidad, los procesadores taguean la TLB de forma tal que la misma contenga el id del proceso que produce cada transacción.
Reducción de Permiso: *Qué sucede cuando el sistema operativo modifica una entrada en una page table?*Normalmente no se provee consistencia por hardware para la TLB; mantener la TLB consistente con la page table es responsabilidad del sistema operativo.
TLB shutdown: En un sistema multiprocesador cada uno puede tener cacheada una copia de una transacción en su TLB. Por ende, para seguridad y correctitud, cada vez que una entrada en la page table es modificada, la correspondiente entrada en todas las TLB de los procesadores tiene que ser descartada antes que los cambios tomen efecto. Típicamente sólo el procesador actual puede invalidar su propia TLB, por ello, para eliminar una entrada en todos los procesadores del sistema, se requiere que el sistema operativo mande una interrupción a cada procesador y pida que esa entrada de la TLB sea eliminada. Esta es una operación muy costosa y por ende tiene su propio nombre y se denomina TLB shutdown.
La TLB¶
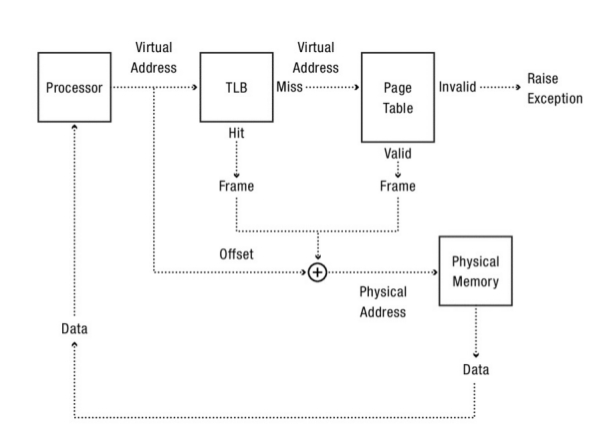
Teniendo en cuenta los siguientes supuestos: una page table lineal (un arreglo) y una TLB que es manejada esencialmente por el hardware, el mecanismo de funcionamiento a groso modo debería ser el siguiente:
Primero se extrae la virtual page number (VPN) de la virtual address y se chequea si la TLB tiene esa traducción para esa VPN. Si existe esa traducción se tiene un TLB HIT que significa que la TLB posee esa traducción.
A partir de ahí, se puede extraer el Page Frame Number (PFN) de la entrada en la TLB
Se concatena con el offset de la virtual address original y con ello se forma la physical address deseada y se accede a la memoria (suponiendo que todos los chequeos de protección no fallaron).
Si la CPU no encuentra esa traducción en la TLB (se tiene un TLB MISS), hay que hacer un poco más de trabajo para obtener la physical address. En este ejemplo:
El hardware accede la page table para encontrar la traducción
Suponiendo que la referencia a la memoria virtual generada por el proceso es valida y accesible se actualiza la TLB con la traducción hecha por el hardware. Este conjunto de acciones es costoso debido a que existen accesos extras a memoria.
Finalmente, una vez que la TLB fue actualizada, el hardware vuelve a buscar la instrucción en la TLB y por ende la referencia a la memoria es procesada rápidamente.
Como todo cache, la TLB, está construida bajo la premisa que el ** caso común ** es que la traducción sea encontrada en el cache. Por ende poco es el costo que se agrega ya que la TLB esta ubicada en cercanías del núcleo que esta realizando el procesamiento y de hecho esta diseñada para ser muy rápida.
Cuando un MISS ocurre se incurre en el alto costo de la paginación; la page table tiene que ser accedida para encontrar la traduccion correspondiente incurriendo en referencias extras a memoria. Si esto sucede mucho el programa va a parecer que se esta ejecutando lentamente.
Un pequeño ejemplo: accediendo a un arreglo¶
En este ejemplo se asumirá que se tiene un arreglo de 10 números enteros de 4 bytes en memoria cuya dirección virtual inicial es 100. Asumiendo además que se tiene un pequeño espacio de direcciones virtual de 8 bits con paginas de 16 bytes, entonces una virtual address se divide en 4 bits (que representan 16 paginas virtuales) y offsets de 4 bits (que representan los bytes de cada una de estas páginas). Es decir, el espacio de direcciones esta compuesto por 16 paginas y cada página posee 16 bytes.
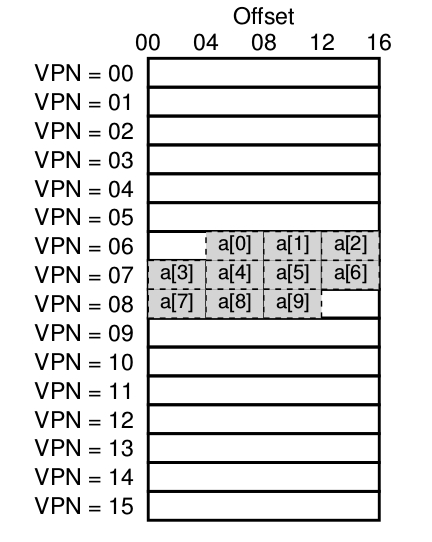
Entonces teniendo en cuenta la imagen el primer elemento del arreglo a[0] empieza en la vpn=06 offset=04, tener en cuenta que en esa página solo encajan 3 enteros de 4 bytes (a[0], a[1], a[2]), el arreglo después continua en la siguiente página vpn=07 ocupando las 4 entradas (a[3], a[4], a[5], a[6]) . Y finalmente las últimas 3 entradas del arreglo (a[7], a[8], a[9]) se localizan en la siguiente pagina del espacio de direcciones VPN=08.
Considerar el simple caso de un siclo que accede a cada elemento del arreglo por ejemplo escrito en C:
int sum = 0;
for (i = 0; i < 10; i++)
sum += a[i] ;
Para simplificar la explicación solo se tendrá en cuenta los accesos de memoria del ciclo generados para el arreglo entonces cuando el primer elemento del arreglo es accedido, la CPU tiene que cargar la virtual address 100.
El hardware extrae la VPN para esta dirección (VPN=06) y utiliza eso para validar en la TLb la traducción.
Asumiendo que es la primera vez que el programa accede al arreglo el resultado de esta operación va a ser una TLB MISS el próximo acceso a un elemento del arreglo, va a generar un TLB HIT, debido a que el segundo elemento esta puesto a continuación del primero y vive por ende en la misma pagina; y debido a que ya se ha accedido a esa pagina la primera vez que se accedió al arreglo, esta traducción se encuentra cargada en la TLB.
Acceder al tercer elemento del arreglo va a caer en la misma situación, otro HIT porque este también vive en la misma pagina.
Desafortunadamente cuando el programa quiere acceder al elemento 4 a[3] se encontrara con otro TLB MISS. Sin embargo, otra vez los elementos 5, 6 y 7 del arreglo van a ser TLB HIT, ya que estos residen en la misma pagina de memoria,
finalmente cuando se acceda al octavo elemento otra vez se obtendrá un TLB MISS. El hardware volverá a consultar la page table para averiguar la ubicación de esa pagina virtual en la memoria física y por ende actualizara la TLB de acuerdo a eso. Los últimos 2 accesos reciben un beneficio porque la TLB se encuentra al día, logrando que la TLB obtenga 2 HIT como resultado.
Entonces resumiendo la actividad de la TLB durante los 10 accesos al arreglo: 3 MISS y 7 HIT por lo tanto se obtuvieron un 70 % de HIT.
Si bien no resulta una mejora increíble la TLB permite una mejora debido a la localidad espacial de los datos. Teniendo en cuenta un ultimo factor si se supone que el programa ni bien termina el ciclo vuelve a acceder al arreglo se vería que el resultados de HITs seria de un 100% debido a la localidad temporal.
Que contiene la TLB¶
Una TLB típica puede tener entre 32, 64, o 128 entradas y ser lo que se llama fully associative. Básicamente esto quiere decir que cualquier traducción puede encontrarse en cualquier lado de la TLB. Una entrada de la TLB contiene los siguientes datos: VPN PFN otros bits ALgunos de los “otros bits” son
bit de validez
bits de protección (ejecución lectura)
dirty bit entre otros
[^1]: Recordar el concepto de time slice. [^2]: Y toda su memoria física. [^3]: Se sabe que esto no es cierto. [^4]: código menor que heap menor que stack [^5]: Toda una responsabilidad!!!!